

 中文简体
中文简体 Mengurangkan motor tanpa berus dengan motor rod push luaran untuk robot perindustrian. Pengurangan pemandu luaran berus Motor merujuk kepada konfigurasi khusus sistem motor tanpa berus yang merangkumi pemacu luaran dan mekanisme pengurangan. Tidak seperti motor yang disikat, motor berus menggunakan komutasi elektronik, yang menghilangkan keperluan untuk berus fizikal. Mereka dikenali sebagai lebih cekap, boleh dipercayai, dan memerlukan penyelenggaraan yang kurang berbanding dengan motor yang disikat. Mekanisme pengurangan digunakan untuk memadankan ciri -ciri motor dengan keperluan khusus aplikasi, seperti menyediakan tork yang lebih tinggi dan kelajuan yang lebih rendah.

HX80X
Motor Bergandu Berus
Pengurangan pemandu luaran tanpa motor berus berus
-
Spesifikasi
Voltan: 12 ~ 48VDC Semasa: 0.5 ~ 65a Pout: 10 ~ 1000W Kelajuan: 5 ~ 600rpm Tork: 5 ~ 37n.m -
Dimensi
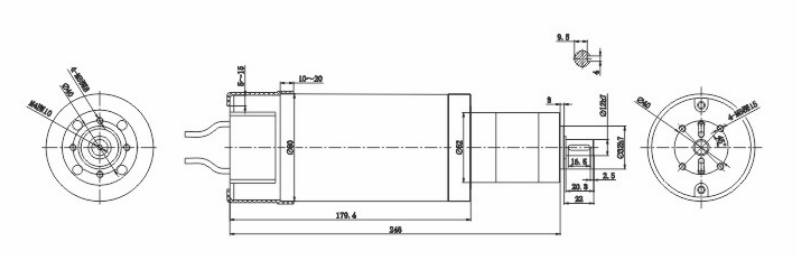
-
Maklum balas
Produk
<
>








Mengenai
Hengye Intelligent Drive (Hangzhou) Co., Ltd.
Ditubuhkan pada tahun 2004, Hengye Intelligent Drive (Hangzhou) Co., Ltd. telah lama memberi tumpuan kepada R & D dan pembuatan motor AC, motors DC, motor servo, motors tanpa berus, motor yang diarah
Hengye telah memberi tumpuan kepada penanaman bakat dan mempunyai sejumlah besar jurutera R & D yang stabil dan stabil, proses dan jurutera yang berkualiti. Pada masa yang sama, Hengye telah terus menaik taraf kapasiti peralatannya, dengan peralatan pemesinan ultra-ketepatan termasuk Okuma, Mazak, Hass, Brother, serta peralatan ujian lanjutan dalam industri, seperti Zeiss, Jenoptik, Mitutoyo, dan sebagainya.
Walaupun menjamin bahawa teknologi dan kualiti melebihi standard industri, Hengye komited untuk menyediakan penyelesaian yang lebih profesional dan cekap untuk membantu pelanggan menyelesaikan masalah. Kami akan bekerjasama dengan pelanggan kami untuk membangun bersama dan mewujudkan masa depan yang cemerlang.
Kekuatan kita
Sijil Kehormatan








Berita
-
Bagaimana Motor DC Berus Berfungsi dan Bila Anda Perlu Menggunakannya?
Bagaimana Motor DC Berus Berfungsi Sebenarnya Motor DC yang disikat menukar tenaga elektrik ke...
Baca lebih lanjut -
Panduan Motor Elektrik: Sumber untuk Aplikasi Perindustrian
Motor elektrik ialah tenaga kerja industri moden, menukar tenaga elektrik kepada gerakan mekanika...
Baca lebih lanjut -
Transaxles Motor Elektrik: Panduan Reka Bentuk, Pemilihan dan Penyelenggaraan
Apakah Gabungan Transaxle Motor Elektrik Sebenarnya An transaxle motor elektrik menyepa...
Baca lebih lanjut -
Bagaimanakah Transaxles Motor Elektrik Meningkatkan Prestasi EV?
Apakah itu Transaxle Motor Elektrik An transaxle motor elektrik menggabungkan motor ele...
Baca lebih lanjut
Copyright© Hengye Intelligent Drive (Hangzhou) Co., Ltd. Hak Cipta Terpelihara

